Weighted graphs
K08 Δομές Δεδομένων και Τεχνικές Προγραμματισμού
Κώστας Χατζηκοκολάκης
Weighted graphs
- Graphs with numbers, called weights, attached to each edge
- Often restricted to non-negative
- Directed or undirected
- Examples
- Distance between cities
- Cost of flight between airports
- Time to send a message between routers
Weighted graphs
- Adjacency matrix representation $$T[i,j] = \begin{cases} w_{i,j} & \text{if } i,j\text{ are connected} \\ \infty & \text{if } i\neq j\text{ are not connected} \\ 0 & \text{if } i = j \end{cases} $$
- Similarly for adjacency lists
Example weighted graph

Example weighted graph
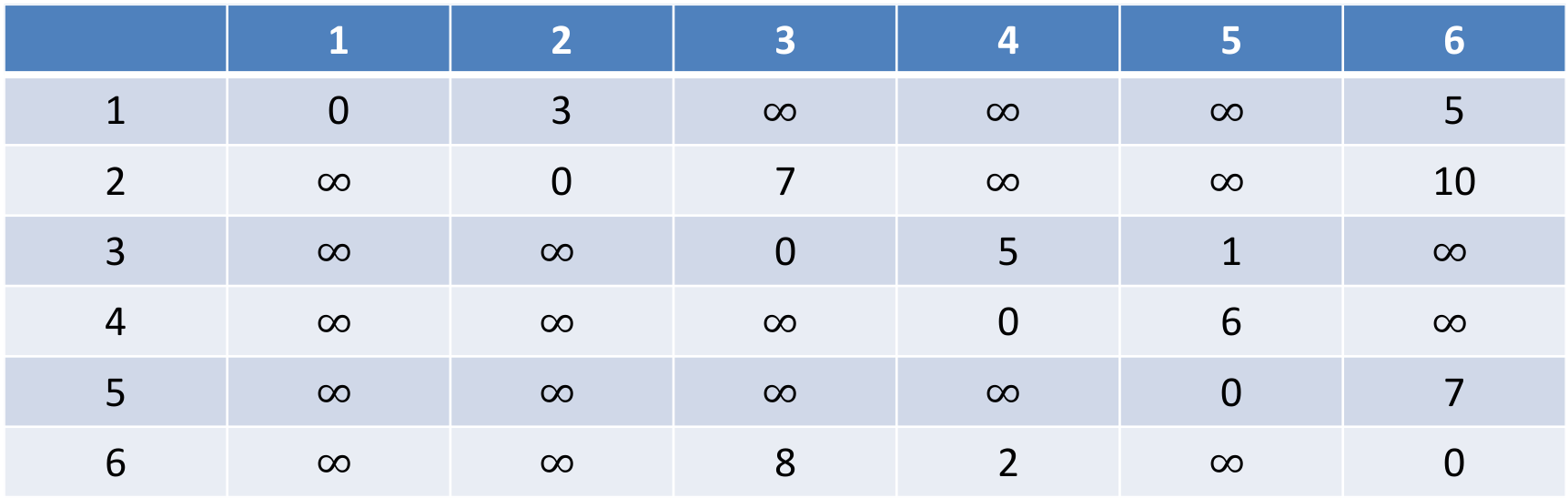
Adjacency matrix
Shortest paths
- The length of a path is the sum of the weights of its edges
- Very common problem
- find the shortest path from $s$ to $d$
- Examples
- Shortest route between cities
- Cheapest connecting flight
- Fastest network route
- …
Shortest path from vertex 1 to vertex 5

Shortest path problem
Two main variants:
- Single source $s$
- Find the shortest path from $s$ to each node
- Dijkstra's algorithm
- Only for non-negative weights (important!)
- All-pairs
- Find the shortest path between all pairs $s,d$
- Floyd-Warshall algorithm
- Any weights
Dijkstra's algorithm
Main ideas:
- Keep a set $W$ of visited nodes
- Start with $W = \{s\}$ $\quad$ (or $W = \{\}$)
- Keep a matrix $\Delta[u]$
- Minimum distance from $s$ to $u$ passing only through $W$
- Start with $\Delta[u] = T[s,u]$ $\quad$(or $\Delta[s] = 0, \Delta[u] = \infty$)
- At each step we enlarge $W$ by adding a new vertex $w \not\in W$
- $w$ is the one with minumum $\Delta[w]$
Dijkstra's algorithm
Main ideas:
- Adding $w$ to $W$ might affect $\Delta[u]$
- For some neighbour $u$ of $w$
- We might now have a shorter path to $u$ passing through $w$
- Of the form $s \to\ldots\to w \to u$
- If $\Delta[u] > \Delta[w] + T[w,u]$
- In this case we update $\Delta$
- $\Delta[u] = \Delta[w] + T[w,u]$
Example graph

Expanding the vertex set w in stages

Expanding the vertex set w in stages

Expanding the vertex set w in stages

Expanding the vertex set w in stages

Expanding the vertex set w in stages

Expanding the vertex set w in stages

Expanding the vertex set w in stages

Expanding the vertex set w in stages

Expanding the vertex set w in stages

Expanding the vertex set w in stages

Expanding the vertex set w in stages

Dijkstra's algorithm in pseudocode
// Δεδομένα
src : αρχικός κόμβος
dest : τελικός κόμβος
// Πληροφορίες που κρατάμε για κάθε κόμβο v
W[u] : 1 αν ο u είναι στο σύνολο W, 0 διαφορετικά
dist[u] : ο πίνακας Δ
prev[u] : ο προηγούμενος του v στο βέλτιστο μονοπάτι
// Αρχικοποίηση: W={} (εναλλακτικά μπορούμε και W={src})
for each vertex u in Graph
dist[u] = INT_MAX // infinity
prev[u] = NULL
W[u] = 0
dist[src] = 0
Dijkstra's algorithm in pseudocode
// Κυρίως αλγόριθμος
while true
w = vertex with minimum dist[w], among those with W[w] = 0
W[w] = 1
if w == dest
stop
// optimal cost = dist[dest]
// optimal path = dest <- prev[dest] <- ... <- src (inverse)
for each neighbor u of w
if W[u] == 1
continue
alt = dist[w] + weight(w,u) // κόστος του src -> ... -> w -> u
if alt < dist[u] // καλύτερο από πριν, update
dist[u] = alt
prev[u] = w
Using a priority queue
- Finding the $w\not\in W$ with minumum $\Delta[w]$ is slow
- $O(n)$ time
- But we can use a priority queue for this!
- We only keep vertices $w\not\in W$ in the queue
- They are compared based on their $\Delta[w]$
(each $w$ has “priority” $\Delta[w]$)
- Careful when $\Delta[w]$ is modified!
- Either use a priority queue that allows updates
- Or insert multiple copies of each $w$ with different priorities
- the queue might contain already visited vertices: ignore them
Dijkstra's algorithm with priority queue
// Δεδομένα
src : αρχικός κόμβος
dest : τελικός κόμβος
// Πληροφορίες που κρατάμε για κάθε κόμβο u
W[u] : 1 αν ο v είναι στο σύνολο W, 0 διαφορετικά
dist[u] : ο πίνακας Δ
prev[u] : ο προηγούμενος του v στο βέλτιστο μονοπάτι
pq : Priority queue, εισάγουμε tuples {u,dist[u]}
συγκρίνονται με βάση το dist[u]
// Αρχικοποίηση: W={} (εναλλακτικά μπορούμε και W={src})
prev[src] = NULL
dist[src] = 0
pqueue_insert(pq, {src,0}) // dist[src] = 0
Dijkstra's algorithm with priority queue
// Κυρίως αλγόριθμος
while pq is not empty
w = pqueue_max(pq) // w with minimal dist[u]
pqueue_remove_max(pq)
if exists(W[w]) // το w μπορεί να υπάρχει πολλές φορές στην ουρά (αν
continue // δεν κάνουμε replace), και να είναι ήδη visited
W[w] = 1
if w == dest
stop // optimal cost/path same as before
for each neighbor u of w
if exists(W[u])
continue
alt = dist[w] + weight(w,u) // cost of src->...->w->u
if !exists(dist[u]) OR alt < dist[u]
dist[u] = alt
prev[u] = w
pqueue_insert(pq, {u,alt}) // προαιρετικά: replace αν υπάρχει ήδη!
stop // pq άδειασε πριν βρούμε το dest => δεν υπάρχει μονοπάτι
Notation
- $s\to d$
- Direct step step from $s$ to $d$
- $s \xrightarrow{W} d$
- Multiple steps $s \to \ldots \to d$
- All intermediate steps belong to the set $W\subseteq V$
- $s \xRightarrow{W} d$
- Shortest path among all $s \xrightarrow{W} d$
- So $s \xRightarrow{V} d$ is the overall shortest one
Proof of correctness
- We need to prove that $\Delta[u]$ is the minimum distance to $u$
- after the algorithm finishes
- But it's much easier to reason step by step
- we need a property that holds at every step
- this is called an invariant (property that never changes)
Proof of correctness
Invariant of Dijkstra's algorithm
- $\Delta[u]$ is the cost of the shortest path passing only through $W$
- And the shortest overall when $u\in W$
Formally:
-
For all $u\in V\;$ the path $s\xRightarrow{W} u$ has cost $\Delta[u]$
-
For all $u \in W$ the path $s\xRightarrow{V} u$ has cost $\Delta[u]$
Proof: induction on the size of $W$, for both (1), (2) together
Proof of correctness
Base case $W = \{ s\}$
- Trivial, the only path $s \xrightarrow{W} u$ is the direct one $s\to u$
- For (1): its cost is exactly $T[s,u] = \Delta[u]$
- initial value of $\Delta[u]$
- For (2): the only $u\in W$ is $s$ itself
Proof of correctness
Inductive case
- Assume $|W|=k$ and (1),(2) hold
- The algorithm
- Updates $W$, adding a new vertex $w\not\in W$
- Updates $\Delta[u]$ for all neighbours $u$ of $w$
- Let $W’,\Delta'$ be the values after the update
- Show that (1),(2) still hold for $W’,\Delta'$
Proof of correctness
We start showing that (2) still holds for $W’,\Delta'$
- The interesting vertex is the $w$ we just added
- Vertices $u \neq w$ are trivial from the induction hypothesis
- Show: $s\xRightarrow{V} w$ has cost $\Delta’[w]$
- Note: $\Delta’[w] = \Delta[w]$ (we do not update $\Delta[w]$)
- We already know that $s\xRightarrow{W} w$ has cost $\Delta[w]$ (ind. hyp)
- So we just need to prove that there is no better path outside $W$
Proof of correctness
- Assuming such path exists, let $r$ be its first vertex outside $W$
- So the path $s \xRightarrow{W} r \xRightarrow{V} w$ has cost $c < \Delta[w]$
- So the path $s \xRightarrow{W} r$ has cost at most $c < \Delta[w]$ (no negative weights!)
- So $\Delta[r] < \Delta[w]$
- Impossible! We chose $w$ to be the one with min $\Delta[w]$

Proof of correctness
It remains to show (1) for $W’,\Delta'$
- Take some arbitrary $u$
- Let $c$ be the cost of $s \xRightarrow{W’} u$
- Show: $c=\Delta’[u]$
- Three cases for the optimal path $s \xRightarrow{W’} u$
- Case 1: the path does not pass through $w$
- So it is of the form $s \xRightarrow{W} u$
- This path has cost $\Delta[u]$ (induction hypothesis)
- No update: $\Delta’[u] = \Delta[u] = c$
Proof of correctness
- Case 2: $w$ is right before $u$
- So the path is of the form $s \xRightarrow{W} w \to u$
- The cost of $s \xRightarrow{W} w$ is $\Delta[w]$ (induction hypothesis)
- So $c = \Delta[w] + T[w,u]$
- So the algorithm will set $\Delta’[u] = \Delta[w] + T[w,u]$
when updating the neighbours of $w$ - So $c = \Delta’[u]$
Proof of correctness
- Case 3: some other $x$ appears after $w$ in the path
- So the path is of the form $s \xRightarrow{W} w \to x \xRightarrow{W} u$
- But the path $s \xRightarrow{W} w \to x$ is no shorter than $s \xRightarrow{W} x$
- From the induction hypothesis for $x \in W$
- So $s \xRightarrow{W} x \to u$ is also optimal, reducing to case 1!

Complexity
Without a priority queue:
- Initialization stage: loop over vectices: $O(n)$
- The while-loop adds one vertex every time: $n$ iterations
- Finding the new vertex loops over vertices: $O(n)$
- same for updating the neighbours
- So total $O(n^2)$ time
Complexity
With a priority queue:
- Initialization stage: loop over vectices, so $O(n)$
- Count the number of updates (steps in the inner loop)
- Once for every neighbour of every node: $e$ total
- Each update is $O(\log n)$ (at most $n$ elements in the queue)
- Total $O(e\log n)$
- Assuming a connected graph ($e \ge n$)
- And an implementation using adjacency lists
- Only good for sparse graphs!
- But $O(n\log n)$ can be hugely better than $O(n^2)$
The all-pairs shortest path problem
- Find the shortest path between all pairs $s,d$
- Floyd-Warshall algorithm
- Any weights
- Even negative
- But no negative loops (why?)
The all-pairs shortest path problem
Main idea
- At each step we compute the shortest path through a subset of vertices
- Similarly to $W$ in Dijkstra
- But now the set at step $k$ is $W_k = \{ 1,\ldots, k\}$
- Vectices are numbered in any order
- Step $k$: the cost of $i \xRightarrow{W_k} j$ is $A_k[i,j]$
- Similar to $\Delta$ in Dijstra (but for all pairs $i,j$ of nodes)
Floyd-Warshall algorithm
- The algorithm at each step computes $A_k$ from $A_{k-1}$
- Initial step $k=0$
- Start with $A_0[i,j] = T[i,j]$
- Only direct paths are allowed
Floyd-Warshall algorithm
$k$-th iteration: the optimal $i \xRightarrow{W_k} j$ either passes thorugh $k$ or not. $$ A_k[i,j] = \min \begin{cases} A_{k-1}[i,j] \\ A_{k-1}[i,k] + A_{k-1}[k,j] \end{cases} $$

Floyd-Warshall algorithm in pseudocode
void floyd_warshall() {
for (int i = 0; i <= size-1; i++)
for (int j = 0; j <= size-1; j++)
A[i][j] = weight(i, j)
for (int i = 0; i <= size-1; i++)
A[i][i] = 0;
for (int k = 0; k <= size-1; k++)
// Compute A_k from A_{k-1}
for (int i = 0; i <= size-1; i++)
for (int j = 0; j <= size-1; j++)
if (A[i][k] + A[k][j] < A[i][j])
A[i][j] = A[i][k] + A[k][j]
}
A is the current $A_k$ at every step $k$.
Complexity
- Three simple loops of $n$ steps
- So $O(n^3)$
- Not better than $n$ executions of Dijkstra in complexity
- But much simpler
- Often faster in practice
- And works for negative weights
Readings
-
T. A. Standish. Data Structures , Algorithms and Software Principles in C. Chapter 10
-
A. V. Aho, J. E. Hopcroft and J. D. Ullman. Data Structures and Algorithms. Chapters 6 and 7